The Idea:

The concept of this assignment took a bit of a journey, but as I said when presenting the final piece, there’s one through line: an animal gets harmed
The original idea I had was quite inspired by one of the examples from the previous years, namely the piece with a string that pulled a puppet upright in different positions when approached. I liked the combination of a simple mechanic tied to a physical material and build that would invoke that type of randomization, because it felt more interactive; everyone approaching the puppet will see a different pose. In an effort to do something slightly different but with a similar effect, I wanted to attempt something like a wavy inflatable tube man that moves randomly with some applied air.
Thus, I came up with an idea to have a plastic penguin that gets blown up with a fan when someone puts their hand over it, and then the blow-up penguin can be pet on the head. The idea being that this sort of animal effigy made of plastic is the only interaction children will be able to have with these kinds of creatures after the effects of climate change wipe out the real versions.
However, I quickly found out that the fan provided by the arduino kit wasn’t quite powerful enough, and I would need to find a different type of fan as well as connect the arduino to a stronger power source. This was a little too daunting, so I devised a different plan.
My next iteration was based more on destruction. The idea that ice caps melting also results in loss for penguins, I was considering that trying to pet a penguin would trigger water to drip down onto your hands, and at a rate where it’s impossible to catch every drop before it reaches the penguin. The bird in question would be made out of cotton candy, and the water would dissolve it. This made for a great rhetoric and visual, but upon further thought, I didn’t know how to reliably build something that could start and stop a drip of water via arduino materials, and dissolving a penguin made of sugar every time I needed to test whether the whole thing worked sounded very tough. From there, I mulled over the idea of not using water, but instead pulling cotton candy birds apart using hooks and strings connected to rotating motors, which sounded more feasible. This still involved a bit of mess when shaping the sugar back together, and the hooks would need to be very specifically shaped and placed in order to pull it apart dramatically enough.
Finally, I chose to pivot the material once more. While searching up pull-apart-toys for inspiration, I came across toys that had velcro limbs for dogs to tear off when playing rough. After some thought, I realized I could do something similar with air dry clay and magnets. This would make for a very easily resettable figurine.
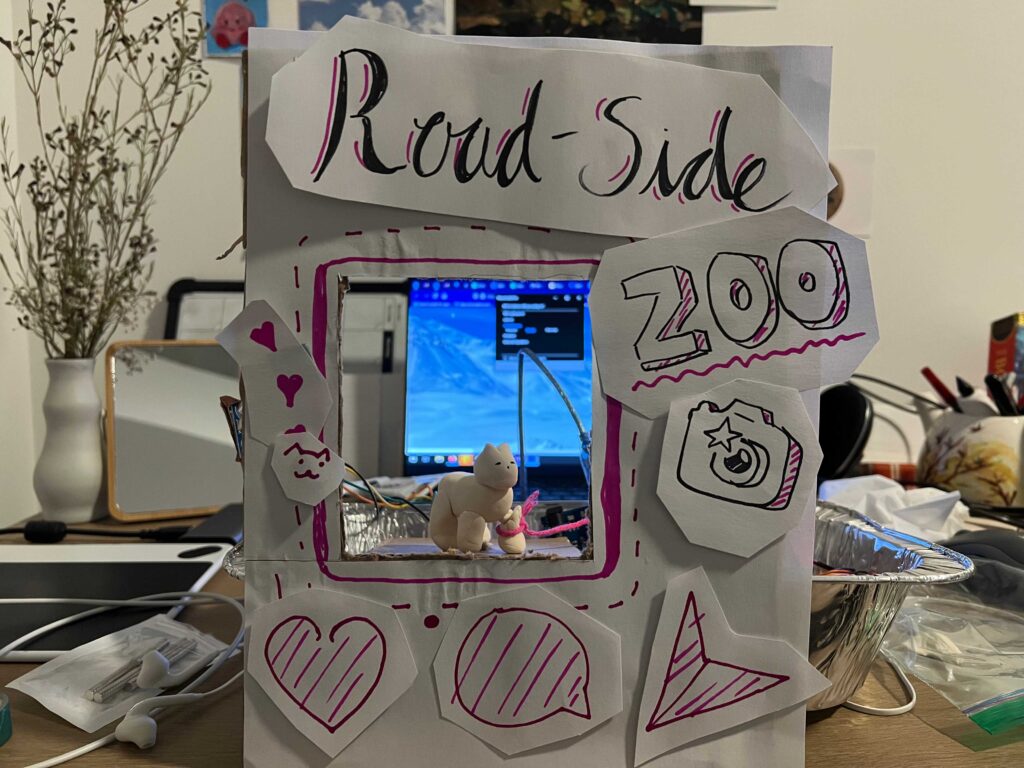
In changing my material so much, I had strayed quite far from my original idea regarding climate change. However, I stumbled upon articles about wild animal game farms and ranches, as well as road-side zoos, in which visitors can take pictures of, with, as well as cuddle the wild animals. They are also notorious for being unethical and treating their animals poorly; a detail that stuck out to me was that since baby animals are so popular, many ranches will put down an older animal causing trouble because it’s cheaper to just procure a new baby. In this future I’ve imagined, there are no more habitats for wild animals; the only way humans will have to interact with them will be through these unethical zoos and ranches. From there, I decided to shift from two legs to four, in order to pull a leg off and achieve a more dramatic topple.
The Development:
The stage set, I was able to get an easy start on my arduino circuitry and code as one of the lab activities provided a good basis for me to work off of. The technical side of my project was very simple; an ultrasonic sensor to detect when a petting hand is in a certain spot, and something to pull off a leg (I decided on a stepper motor) when activated. The lab in question had code and circuitry that would activate when something is detected within a certain distance. I managed to recreate it fine, and then found code for working a stepper motor online. Miraculously, combining the code from the latter into the former worked upon my first attempt; an unheard of occurrence. The rest of the build was mostly physical.
I learned that I had to add a little cardboard winch to my motor in order to get anything done, and fix it in place in order to have it pull objects and not itself. Positioning the ultrasonic sensor also took quite a bit of cardboard and tape. Lacking the finished sculpture and any available string at the time, I did a lot of testing with a scrunchie and a hair I plucked out my head, which turned out to be surprisingly effective.
Having figured out the rough mechanics, all that was left was the visuals; I picked up a strand of yarn from the craft supplies in the TSRB so as not to freak anyone out with my loose hair, then crafted a little cat-like animal out of air dry clay. When sculpting it, I left a leg off and embedded a magnet into both the limb and the body, so that the limb could be easily taken off and reattached. I made sure that there was an extra layer of clay around each magnet so the force wasn’t so strong the stepper motor couldn’t pull it off. I also learned that I built the creature a little too sturdily, and had to reshape the feet so that it couldn’t stand well on only three legs. I also put a little tape on its platform so that it wouldn’t get pulled off with the leg still on, as that wasn’t as interesting of a visual. To enhance the rhetoric, I made a frame that looked like an instagram post from a road-side zoo to showcase the creature. It also served some extra purposes of making sure anyone interacting with the piece would put their hand in the right place, and also helped hide some more unsightly wires and other elements.
If I were to do this project again, I think I would have put a little more time and effort into the sculpture; maybe tried an animal with thinner legs for the dramatic topple. As it was, it was a good decision to make entirely sure that the creature I ended up with can stand up pretty reliably.
The Final Result:
I am quite happy with how it turned out. The technology working out relatively early in the process meant it wasn’t quite as stressful as the previous two projects, and that was a nice way to end off my time with this class!
The video I made for this project, with all my photos, is here, as well as my code: https://drive.google.com/file/d/1XjtfGmu5x9d9r48kWTE0EEhcnjeVwJLk/view?usp=drive_link
Credit:
Code bases:
https://www.instructables.com/Controlling-a-Servo-With-an-Ultrasonic-Sensor-Usin
https://github.com/SimpleElectronicsYT/Stepper-Examples/tree/main/Stepper_Example_1
Rhetoric sources:
Leave a Reply