The topic of my final project focuses on envisioning future interfaces for cars equipped with autonomous driving modes.

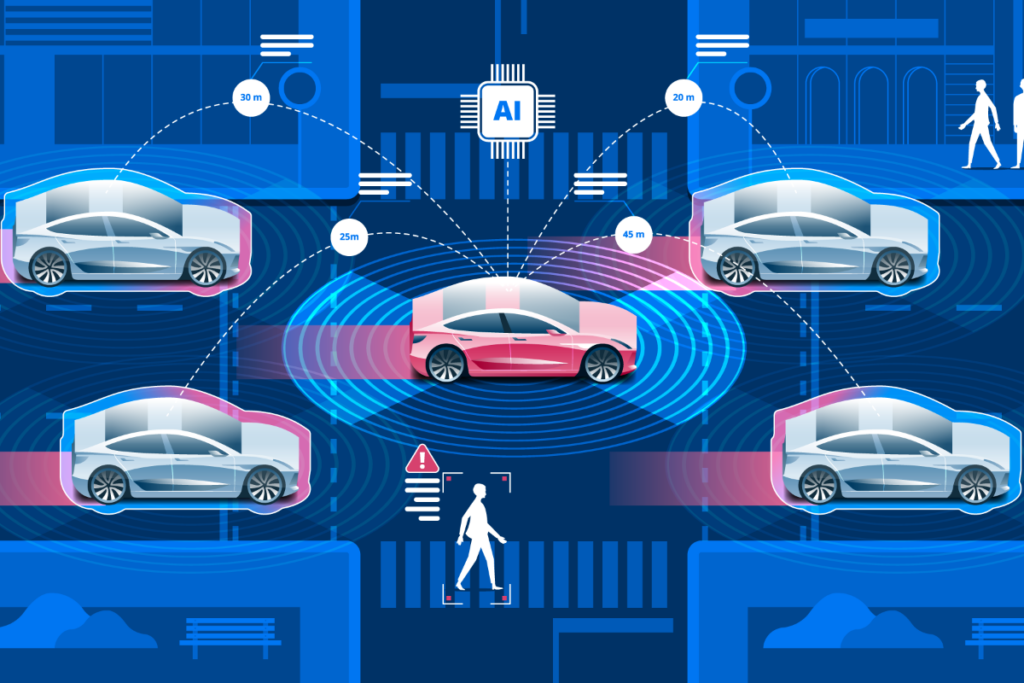
I am particularly interested in exploring how the Car-AI will communicate real-time information, provide updates, and handle sudden emergency situations to effectively keep drivers informed.
To be more specific, cars equipped with embedded AI can detect on-road situations, such as construction zones, and automatically find alternative routes, updating the entire journey accordingly. However, the key question is: how will these cars effectively communicate such information to the driver?
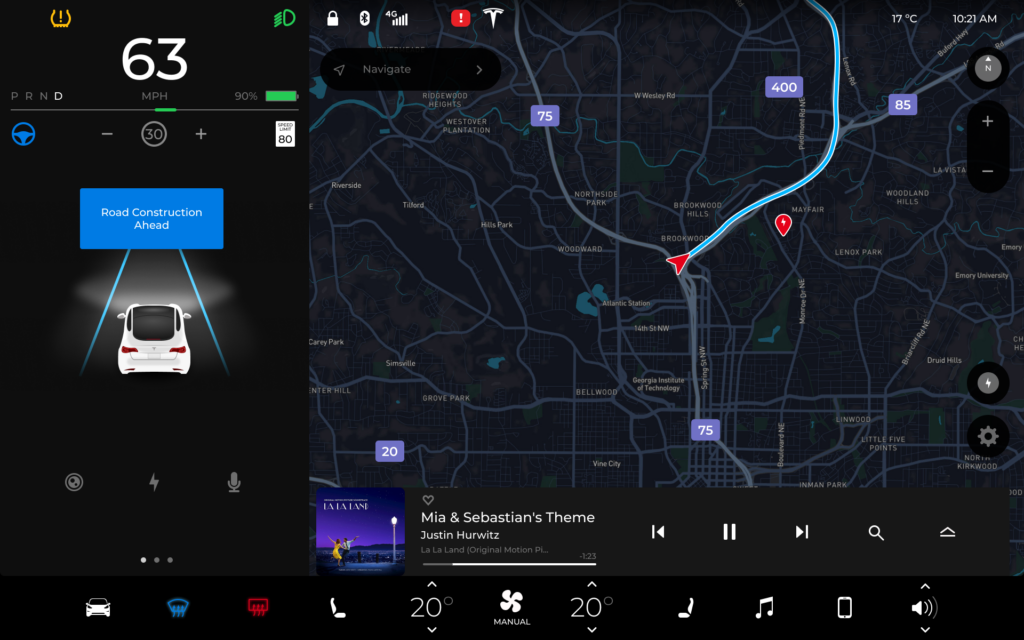
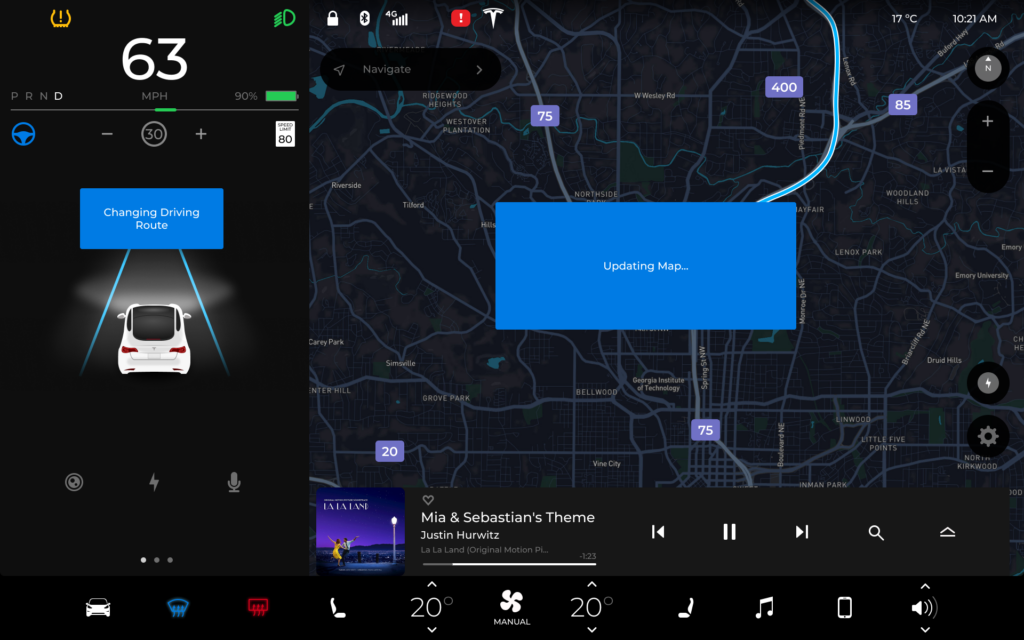
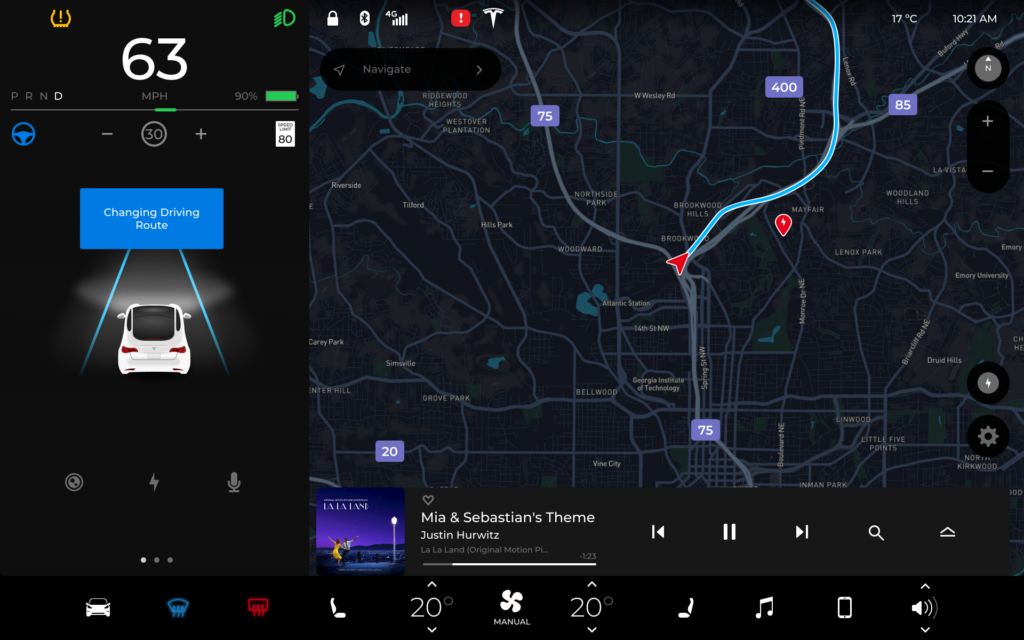
I have created some Figma sketches to further illustrate my idea. Imagine this as the interface for a future Tesla. The car’s AI is capable of detecting construction ahead, calculating an alternative route, updating the journey, reflecting the changes on the map, and effectively communicating this information to the driver.
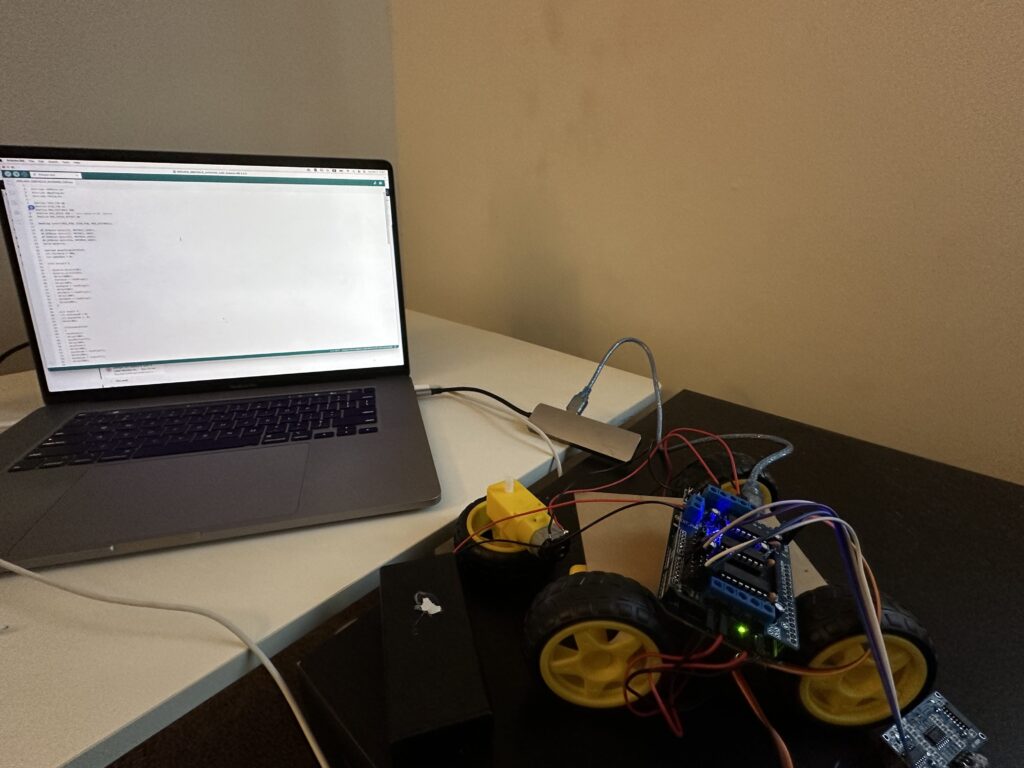
For this project, I used Arduino to build a car capable of detecting obstacles in its path and finding an alternative route. To add a creative element, I attached a marker to the car, allowing it to draw as it moves. The resulting drawing pattern serves as a playful representation of the pathfinding process for an autonomous car and even as an artistic expression of driving-AI functionality. For the presentation, I made obstacles using paper to demonstrate the car’s ability to navigate and adapt.
Link to Video:
https://drive.google.com/file/d/1z9VHSWRZeF3tE-A8BP5rMXFbInEWgLvB/view?usp=sharing
Final Drawing:

Link to Code:
https://drive.google.com/file/d/1AXwNSvXff6hxQqzng9xIGxajxRB29c_L/view?usp=sharing
Process:
The process can be divided into three main stages:
- Constructing the car: Building the physical components of the car.
- Writing and debugging the code: Developing the logic to control the car’s functionalities.
- Testing, debugging, and preparing for the performance: Ensuring all components work seamlessly and addressing any issues.
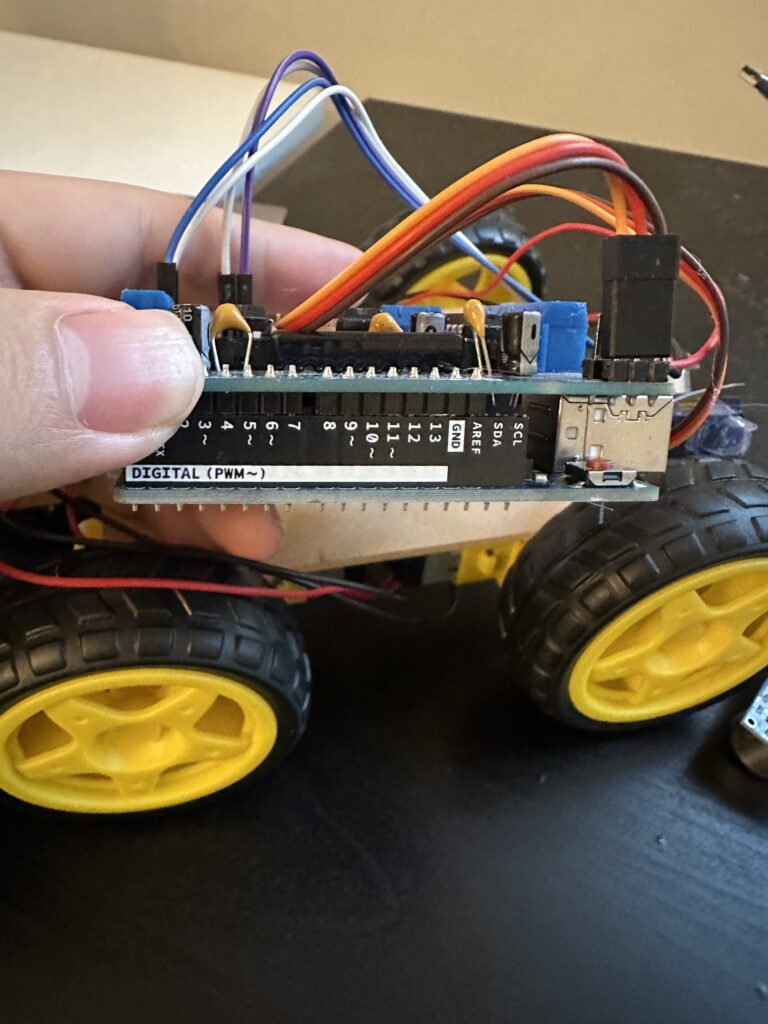
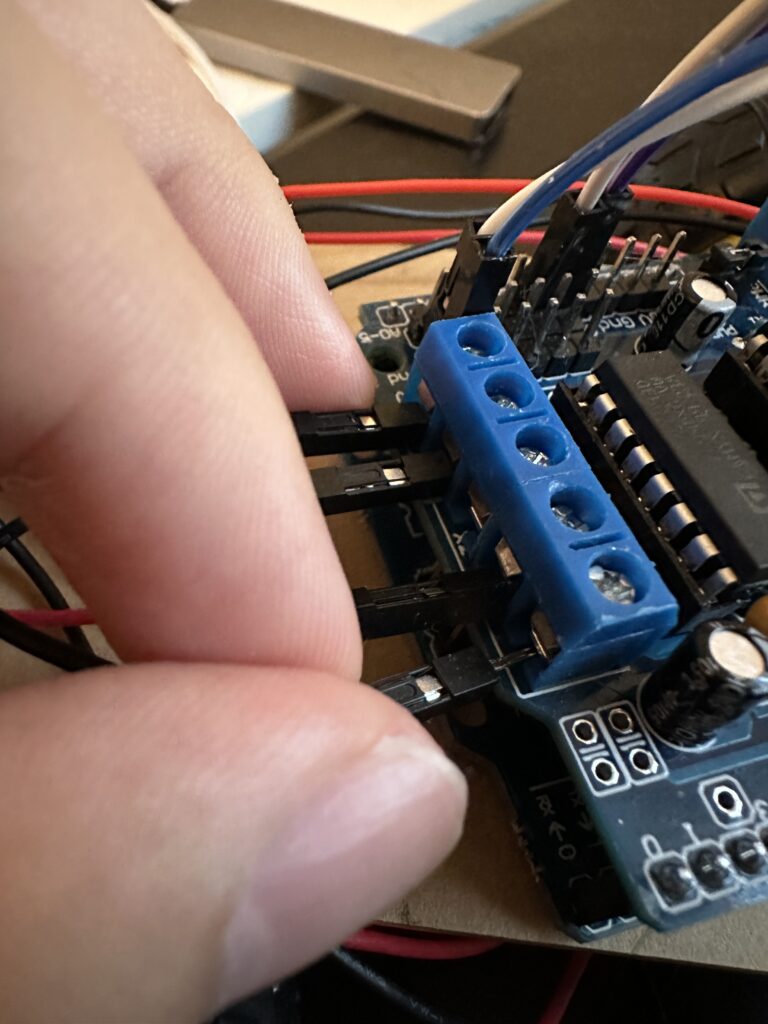
The second stage was the most challenging for me. It was particularly difficult to get the ultrasonic sensor and servo motor to work properly, and figuring out the correct wiring connections was equally complex. Additionally, the car often broke during testing and debugging, requiring me to reconstruct it multiple times. Despite these challenges, the iterative process provided valuable learning opportunities.
Process Images:
Reflection:
This project and the physical prototyping process taught me a great deal. Working with Arduino involved extensive debugging and testing, which required strong time management skills and patience. Overall, I am pleased with the final outcome and thoroughly enjoyed the learning experience.
Next Steps:
Using an Arduino prototype as an extension of a User Experience Design project has been inspiring. In the future, I plan to revisit the Figma prototype, refine it, and feature it as a polished portfolio piece on my website.
For the Arduino aspect, I’m excited to explore further concepts around “autonomous” driving cars. For instance, what if the car could follow a trail on the ground or operate based on voice commands? These possibilities could lead to even more innovative and engaging autonomous driving experiences.
Leave a Reply